2 minutes
Voiture autonome avec Unity et Keras
Cet article présente le résultat de mon travail sur la construction d’un véhicule autonome dans un simulateur. J’ai suivi un whitepaper rédigé par une équipe de Nvidia qui est disponible à l’adresse suivante: http://images.nvidia.com/content/tegra/automotive/images/2016/solutions/pdf/end-to-end-dl-using-px.pdf
Le training a été fait non pas sur une Nvidia Drive PX comme précisé dans le paper mais sur un Macbook Pro durant 1 nuit.
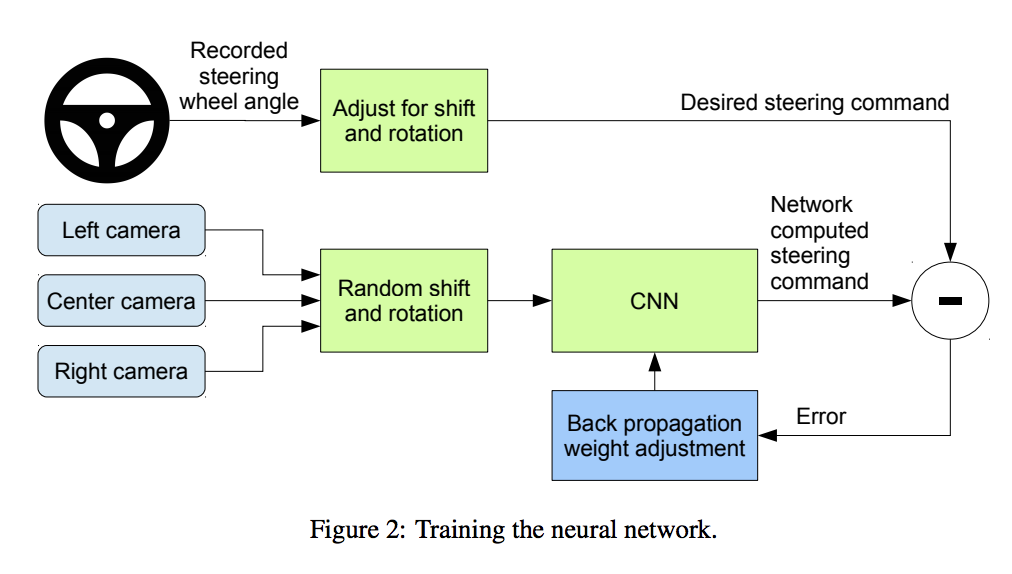
Le problème de conduite de véhicule autonome est ramené à un problème d’apprentissage supervisé. Grâce au simulateur opensource d’Udacity, des données d’apprentissage peuvent être extraites.
- En entrée X, on a des images de la route. En effet, à l’avant du véhicule, il y a 3 caméras. Une filme le côté gauche du véhicule, une autre le devant et une dernière filme le côté droit.
- En sortie Y, on a l’angle du volant.
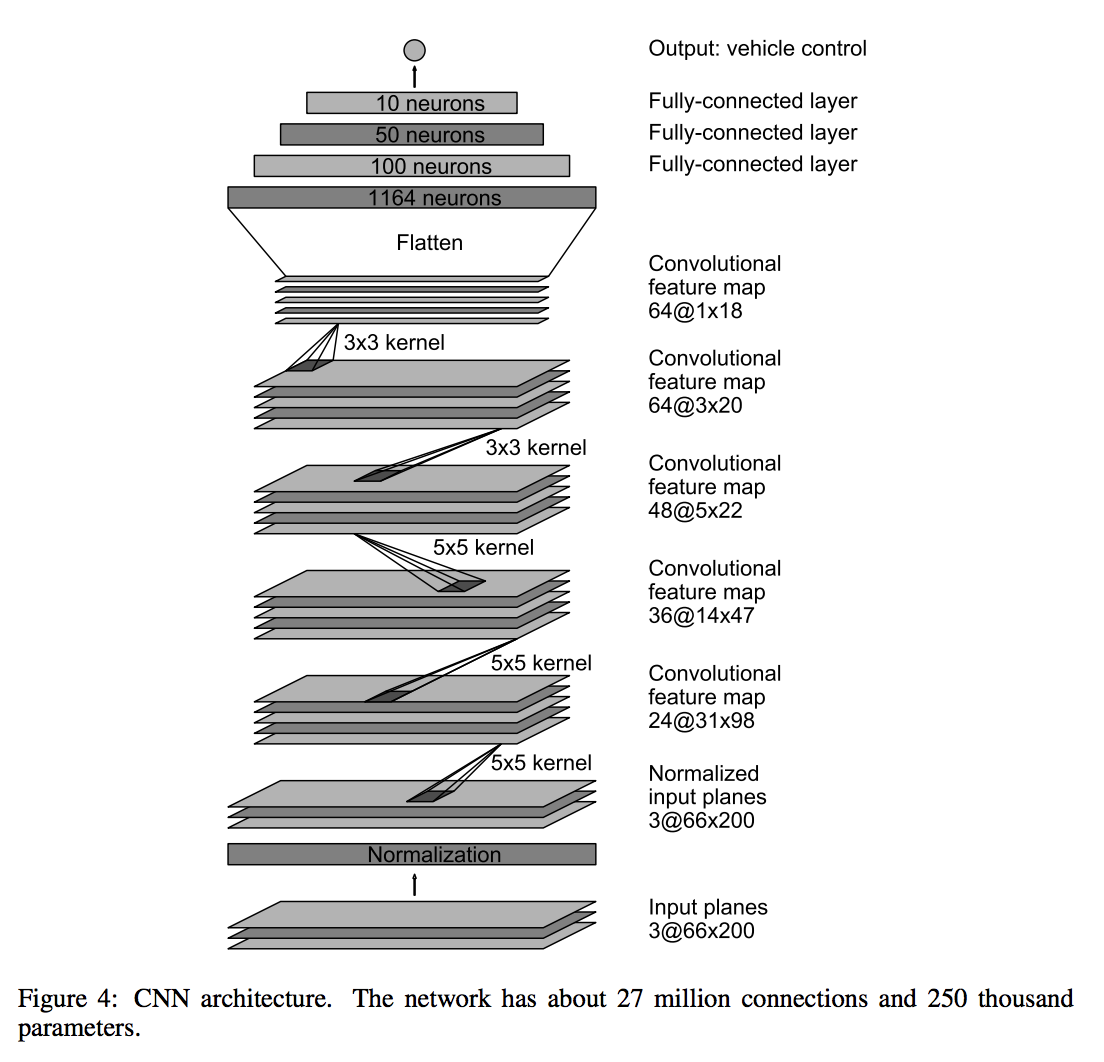
Le modèle est construit et entraîné avec Keras (et Tensorflow en backend).
Le modèle suivant est implémenté:
Comme vous avez pu le voir sur la vidéo au dessus, après une nuit d’apprentissage, notre véhicule suit bien la route en toute autonomie.
Maintenant, si vous voulez construire votre propre voiture autonome grandeur nature vous savez comment faire… Il faut placer 3 caméras sur le capot de votre véhicule, lire le bus CAN et pouvoir agir sur l’angle du volant (et sur les pédales aussi!).