Une minute
Get GPS coordinates on ESP32 using Rust
In this article we are going to see how to retrieve NMEA sentences from a GPS module NEO-6M connected to an ESP32.
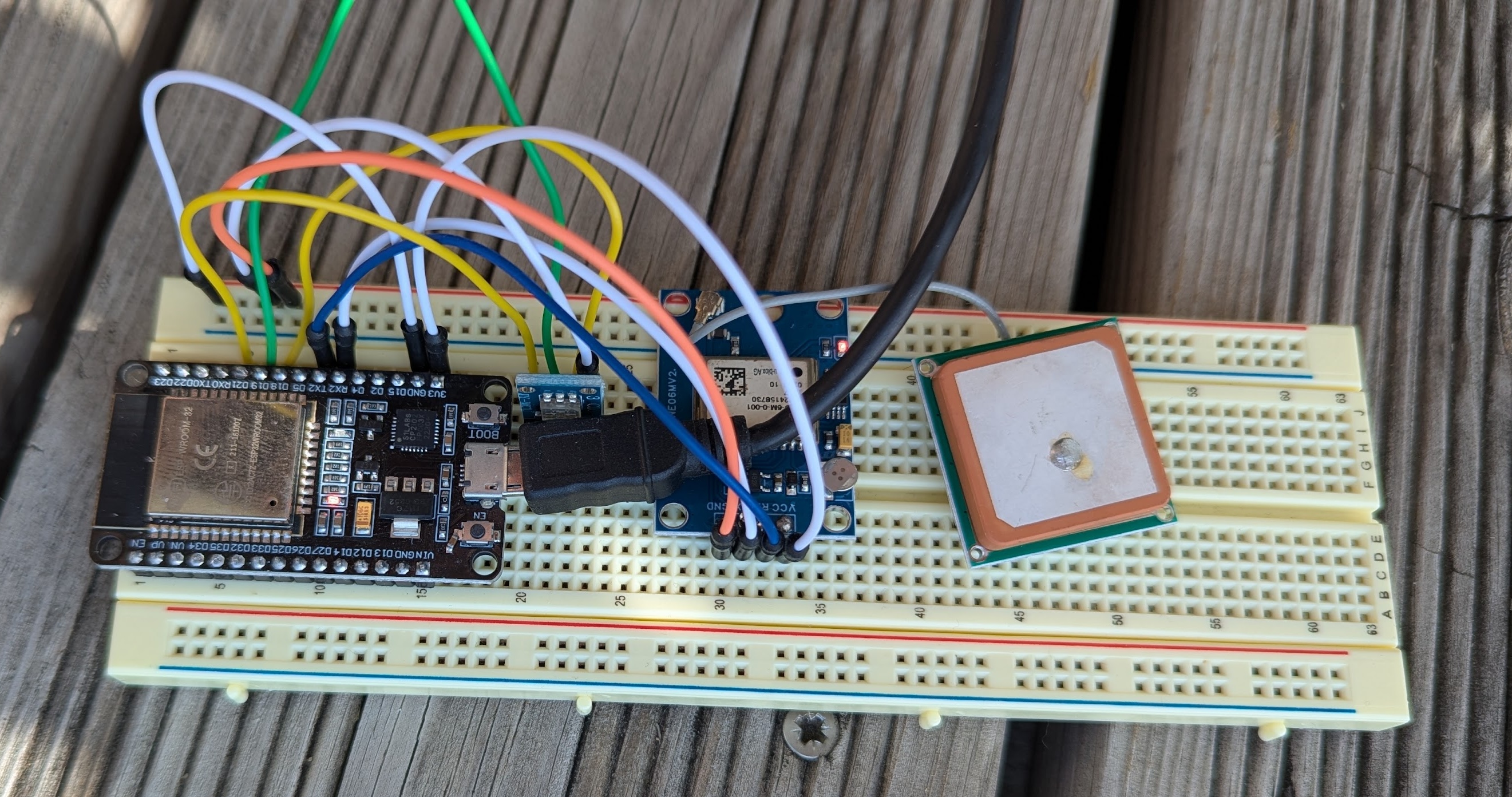
Connect the NEO-6M GPS module to the ESP32
Dependencies:
esp-idf-svc = { version = "0.51", features = ["critical-section", "embassy-time-driver", "embassy-sync"] } esp-idf-hal = "0.45.2"
use esp_idf_hal::peripherals::Peripherals;
use esp_idf_hal::prelude::*;
use esp_idf_hal::uart::*;
use esp_idf_svc::hal::uart::config::DataBits;
use esp_idf_svc::hal::uart::config::StopBits;
fn main() -> Result<(), Box<dyn std::error::Error>> {
// Lien des patches ESP-IDF
esp_idf_svc::sys::link_patches();
// Configuration du logger
esp_idf_svc::log::EspLogger::initialize_default();
log::info!("Démarrage de l'application GPS");
// Initialisation des périphériques
let peripherals = Peripherals::take().unwrap();
// Configuration de l'UART
let config = config::Config::default()
.baudrate(Hertz(9600))
.data_bits(DataBits::DataBits8)
.parity_none()
.stop_bits(StopBits::STOP1);
// Création du driver UART avec typage explicite
let mut uart_driver = UartDriver::new(
peripherals.uart2,
peripherals.pins.gpio17, // TX
peripherals.pins.gpio16, // RX
Option::<esp_idf_hal::gpio::Gpio0>::None, // RTS (pas utilisé)
Option::<esp_idf_hal::gpio::Gpio0>::None, // CTS (pas utilisé)
&config,
)?;
println!("UART initialisé avec un débit de 9600 bauds");
// Buffer pour stocker les données GPS
let mut buffer = [0u8; 128];
loop {
// Lecture des données disponibles sur l'UART avec timeout
match uart_driver.read(&mut buffer, 1000) {
Ok(bytes_read) if bytes_read > 0 => {
let gps_data = &buffer[..bytes_read];
println!(
"Données GPS reçues : {}",
String::from_utf8_lossy(gps_data)
);
},
Ok(_) => {
println!("Aucune donnée GPS reçue (timeout)");
},
Err(e) => {
println!("Erreur de lecture UART: {:?}", e);
}
}
println!("-------------------------------");
std::thread::sleep(std::time::Duration::from_secs(1));
}
}